
Buddy II is an rov,
Buddy II
Buddy II is an implementation of buddy I able to carry batteries
and its own onboard computer. The idea is to have a webcam streaming
video and status monitoring, and control over an 802.11 connection. conputer on robot side runs linux of course.
HERE is buddy II'd video window, and an irc controllable set of lights
HERE we have the assembly of buddy II thus far
otherwise, this is what exists of the design of buddy II:
Parts Collection:
- K7-500 on a K7M motherboard
{ I forgot to take a picture }
- 2 x 108VDC motors
- 2 x sunbeam gearboxes (slight final mods needed)
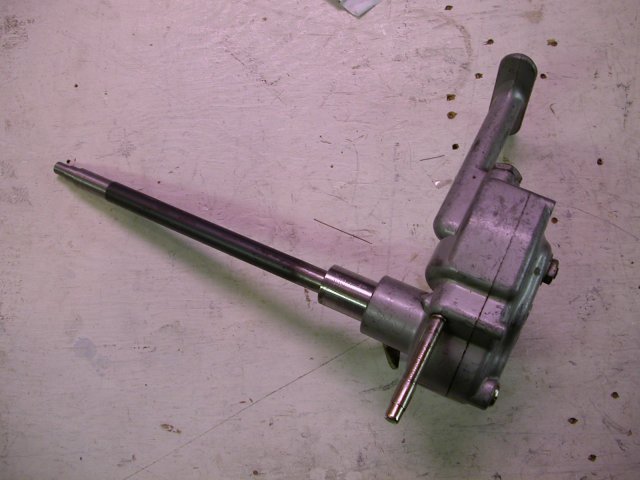
this next photo shows it apart, which is really just a way to cover up thr fact I found out it dosn't fit togethor right (need some filing)

- 2 x 6" lawnmower wheels

- 1 Caster wheel

- 1 webcam (will be replaced with videocamera/capture card when proven out)

- colour video camera
{ I didn't even think of taking a picture }
- 1 10/100 pci ethernet card (will be used until operation proven out)

Rue Nahc Mohr.