no, its not waterproof yet, like I say, still working on it. Sofar its capable of mowing within a penned area, and you have to watch the battery dosn't get too low, but I'll fix all that up soon 'nuff.
How does it work?
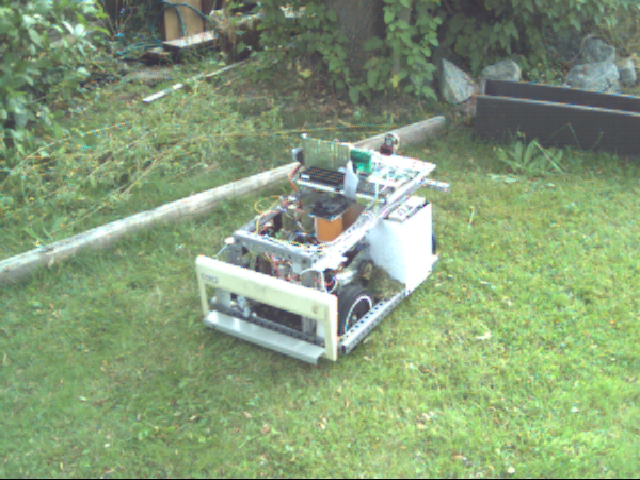
The front bumper is a collision detector, it also has two optical range
sensors that act like wiskers on the sides. You can see one of them here,
its the red thing between the tire and the front bumper.
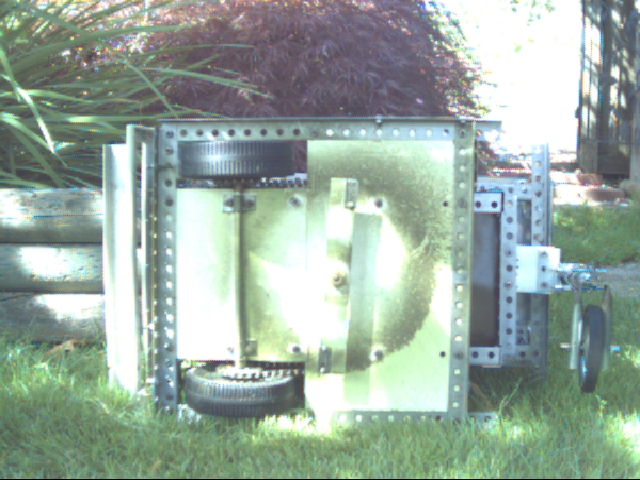
The blade is about 10", with razer blades bolted to the edges. better seen here (removed later cause they kept getting broken and bits were lost)
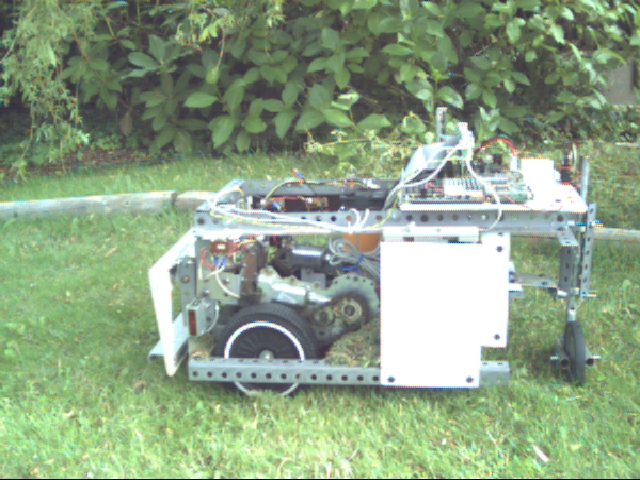
Mowerbot runs a 386, primarily due to the fact that a 386 only needs 5V to run.
Its running DOS, origionally off a 1.2M floppy, but currently off an CF card.
DOS w/ QBASIC allows me to plug in a screen and keyboard at any time and rewrite the software.
Keep in mind, this thing was built (v1) back in 1998. There was no other affordable platform you could realtime develop on.
CREDITS:
Jeff Moorcroft (front bumper design and misc)
Sean Huggins (computer mounting and misc)
There are no spelling erors in this, my room is declared
as a seperete country in wich the rules of spelling are difrent. I don't
take responceability for a mowerbot running over your pet. I do make mistakes,
and if there is one in a schematic i have provided you have my permission
to write me a mean letter.