First, I'll start by saying this isn't some homework assignment, this
is one of those rare, real-life problems.
I made this web page cause I'v had to explain the problem so many times.
Sorry if I use a capital L as the angle symbol...
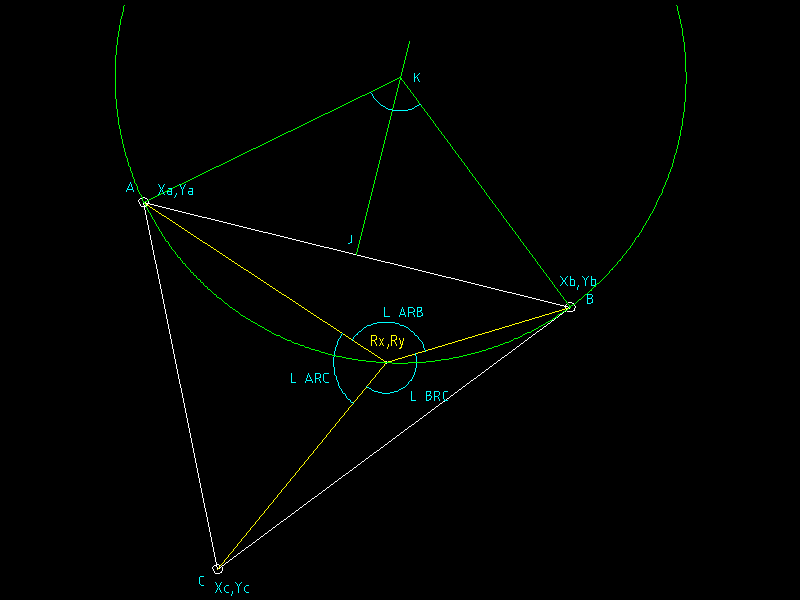
- A robot (R) is on a field with 3 positioning beacons (A, B, and C)
- The robot knows the real-world positions (x, y) of the 3 beacons.
- The robot is able to scan around it and obtain the angles, between
the 3 beacons, the scanning process also identifies the beacons (it
knows which is which) It CANNOT get information on its distance from it
to the beacons due to hardware limitations (via financial limitations)
The goal is to calculate the position of the robot (Rx,Ry) from the 3
angles (L ARB, L BRC, L ARC)
Angles that are known
L ARC
L BRC
L ARB
L ABC
L ACB
L BAC
Distances that are known
AB
BC
AC
Things that might be of help I'v worked out so far (the
maybe-not-so-obvious)
> L RCB + L RBC = L ARC + L ARB - 180
> L RCA + L RAC = L ARB + L ARC - 180
> L RAB + L RBA = L BRC + L ARC - 180
> L RAB = 360 - L RCB - L ABC - L BRC - L ARB
> L RBC = 360 - L RAC - L ACB - L ARC - L BRC
> L ABR = 360 - L ACR - L BAC - L ARB - L ARC
An idea is to get two angles such as L RCB and L RBC, form two line
equations based on their slope and the fact they pass through C and B,
and calculate the intersection point.
- Credits to lhf of #math who
pointed out the following:
1) - If line JK is created such that its a perpendicular bisector of
line AB
2) - Then creates lines AK and BK such that L AKB = 360 - 2*(L ARB)
3) - Then draw a circle with center on intersection of JK and AK that
passes through A and B
4) -> Point R will lie on that circle, if the same is done for
beacons B and C, the two intersections will be the beacon in common (B)
and the robots position (R)
step 2 seems kinda trickey till ya tear it apart a little more. JK
bisects L AKB and JK is perpendicular to AB, so with some quite simple
math, L JAK = L ARB - 90
- Credits to DWarrior of #math who took a successfull, yet round
about style of the following, that lead me to the answer.
1) Sine rule: AR/sin(L ABR) = AB/sin(L ARB)
2) Sine rule: AR/sin(L ACR) = AC/sin(L ARC)
3) isolate 1 for AR: AR = AB(sin(L ABR)/sin(L ARB)
4) isolate 2 for AR: AR = AC(sin(L ACR)/sin(L ABC)
5) equate AR = AR: AB(sin(L ABR)/sin(L ARB) = AC(sin(L ACR)/sin(L
ABC)
6) isolate for L ABR: sin(L ABR) = (AC/AB) * (sin(L
ARB)/sin(L ARC)) * sin(L ACR)
7) pull our knowns togethor to simplify: M = (AC/AB) * (sin(L
ARB)/sin(L ARC)
therefore: sin(L ABR) = M * sin(L ACR)
8) now, using the other 6 rules above, we can translate ABR into ACR so
that everything is expressed in terms of one unknown ( L ACR ) . I'm
going to drop the L symbol for this. Note that angle XYZ is same as
angle ZYX
The translation loop is as follows: ABR<->CBR<->RCB<->RCA<->CAR<->RAB<->ABR
ABR->ACR
a) given: ABR + CBR = ABC
b) re-arange: ABR = ABC - CBR
c) given: 180 - BRC = RBC + RCB
d) re-arange: RBC = 180 - BRC - RCB
e) substitute: ABR = ABC - (180 - BRC - RCB)
f) clean: ABR = ABC - 180 + BRC + RCB
g) given: RCB + ACR = BCA
h) re-arange: RCB = BCA
- ACR
i) substitute: ABR = ABC - 180 + BRC + BCA - ACR
Done. ABR is expressed as ACR being the only unknown
we had: sin(L ABR) = M * sin(L ACR)
9) re-express in terms of L ACR: sin( L ABC - 180 + L BRC + L BCA
- L ACR) = M * sin(L ACR)
10) pull knowns again to simpify: D = (L ABC - 180 + L BRC + L BCA )
therefore: sin( D - L ACR) = M *
sin(L ACR)
11) Use rule sin(a-b) = sin(a)cos(b) - cos(a)sin(b): sin(D)cos(L
ACR)-cos(D)sin(L ACR) = M sin(L ACR)
12) seperate knowns and unknowns:
sin(D)cos(L ACR) = M sin(L
ACR)+cos(D)sin(L ACR)
sin(D)cos(L ACR) = sin(L ACR) * (M +
cos(D))
sin(D)/(M + cos(D)) = sin(L ACR)/cos(L ACR)
13) apply sin(a)/cos(a) = tan(a): sin(D)/(m+cos(D)) = tan(L ACR)
14) arc it: ACR = atan(sin(D)/(M+cos(D)))
done! thats the trickey angle
so:
ACR = atan(sin(D)/(M+cos(D)))
D = (L ABC - 180 + L BRC + L BCA )
M = (AC/AB) * (sin(L ARB)/sin(L ARC)
now that the anlges of the lines that intersect at the robot are known,
(and points as they go through the beacons) we can solve for the
position of the robot by calculting the line intersecion.
trick now is to traslate that all to math that a 16mips 8 bit machine
can do in under 0.5 seconds.
Rue